婴儿二代娃娃论证说明
娃娃硬件部分
硬件部分是构成娃娃身子组成的所有部分,包括搪胶身子、海姆立克装置、主板、各种传感器与打印件。
目前娃娃硬件已经成型,并且物料基本已经采购好了,有部分功能还有不足,但也只能放到下一代进行完善。
关于不足的婴儿二代功能如下:
海姆立克功能从技术层面来说已经实现,但是需要在技术人员的操作下才可能实现完整功能,并且整个操作比较麻烦:
a. 海姆立克操作完之后,头朝下的时候异物珠没发受重力的影响自然流出,需要将头部朝上之后,才可能会流出。
b. 海姆立克的异物珠在管道中是看不到的,当异物珠没有、卡住的时候是无法能够直观的知道。
c. 异物珠重新往回塞,可能会有点问题(技术人员应该问题)。
头部支撑的判断目前只能实现后颈的触摸支撑,想要实现海姆立克的支撑下巴判定,只能在下一代进行完善。
娃娃功能
喂奶操作
- 将婴儿抱起,使之斜靠在喂哺者的臂弯中,脚踩小凳子,喂哺者和婴儿都以舒适的方式坐定后开始喂哺。
- 用奶嘴轻触婴儿的嘴角,当婴儿张嘴时将奶嘴放入婴儿口中,让宝宝含住整个奶嘴。
- 调整奶瓶的方向,将奶瓶倾斜 45 度角,使奶嘴内充满奶液,避免婴儿吸入过多的空气。
- 待婴儿吃完奶瓶中的奶液后,轻轻将奶嘴从嘴角退出来,用小毛巾将婴儿嘴角的奶渍擦干净。
1. 测试时长默认 180(操作页面可以自定义)
2. 触摸传感器在嘴巴位置,
3. 每秒检测一次,连续 3 次检测成功算作一次有效记录。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。臀部清洁
1、脱纸尿裤
- 拉开纸尿裤的魔术贴。拉开魔术贴后直接粘在纸尿裤上,以防损伤婴幼儿皮肤。
- 一只手提起双腿 (拇指和中指握住婴儿的两只足踝,食指放在双踝之间),将腿和臀部轻轻抬起。
- 另一只手用尿布的干净面从前向后擦去腹部、腹股沟、会阴、臀部等处的污物。
- 将纸尿裤向内对折,垫在臀下。用湿纸巾清洁臀部。
- 一手提起双腿,使臀部略略抬高,另一手取出臀下污湿纸尿裤,折卷后放入垃圾桶。再次用温水清洗臀部,沾干并做臀部护理。
2、穿纸尿裤
- 将干净纸尿裤,
- 抓住宝宝一侧的手,使婴儿侧身,将纸尿裤垫与宝宝臀下,将纸尿裤轻轻拉起来,再将魔术贴扣好后,检查松紧度,能容纳一手指,松紧适宜。新生儿脐带未脱落时,上缘一定不要覆盖脐部,需反折。
- 再用食指把纸尿裤褶边钩起来,以防漏尿。男婴的尿布前部容易尿湿,所以前部应垫得厚一些。女婴的背后容易被尿湿,所以在背后垫得高一点。
1. 测试时长默认 180(操作页面可以自定义)
2. 屁股部位有 RFID 天线,肛门附近有双联触摸传感器。
3. 每秒获取一次数据,整个操作流程需要是:脱下尿裤、擦屁屁、换上新的尿裤。
(因为带有 RFID 标签的尿裤尚未定制,没有完整的进行测试)
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。海姆立克 (婴儿)
背部拍击:
- 将婴儿俯卧于在一侧手臂上,以大腿为支撑,头低于躯干,一手固定下颌角并打开气道。
- 另一只手掌根在婴儿两肩胛骨连线中点用力拍击 5 次。观察异物有没有被排出。
胸部冲击法:
将婴儿翻转为仰卧位,仰卧在另一手的前臂上,,以大腿为支撑,头低于躯干。
一手固定患儿头颈位置,一手伸出食指中指,快速压迫婴儿两乳头连线中点,重复 5 次。
交替背部拍击和胸部冲击,直至将异物排出或婴儿失去知觉反应。
1. 测试时长默认 180(操作页面可以自定义)
2. 主板上面有震动传感器。
3. 每秒钟检测一百次,将震动的结果进行累加(频率检测)。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。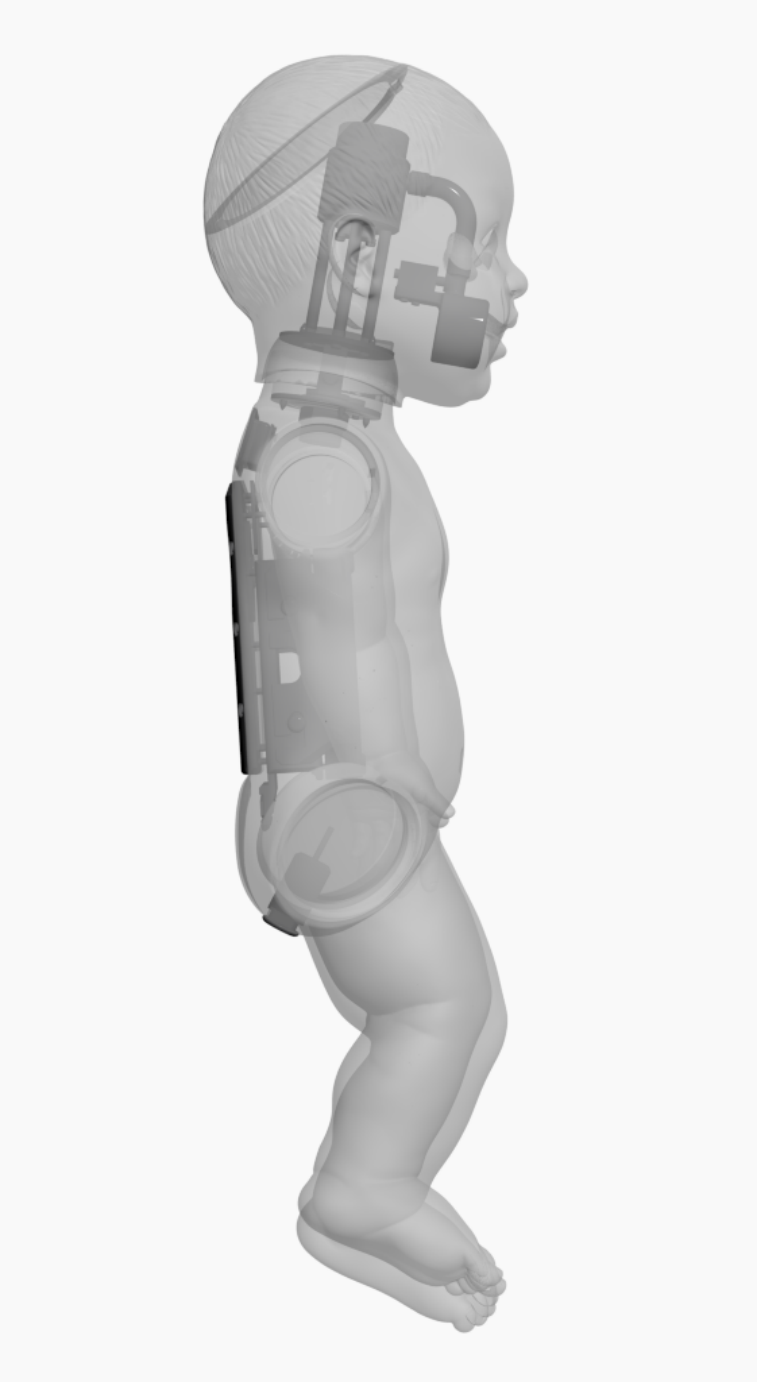
拍嗝处理
- 提前准备小毛巾放置在肩上
- 将宝宝从摇篮抱转换为竖抱,一手托宝宝的头颈肩,一手托宝宝的臀部,用肩膀去紧贴宝宝的下颌,顺势上肩,将宝宝的头偏向一侧, 避免堵住宝宝的口鼻,照护者身体轻轻往后倾斜,一手托臀,一手用空心掌以适度的力量和频率,由婴儿的背中部由下往上拍打宝宝的背部,使婴儿打嗝,将吸入到胃中的空气排出。
- 当宝宝打完嗝之后,一手托宝宝的头颈肩,一手托宝宝的臀部,将宝宝放下来,转换为摇篮抱,再将宝宝放置床上休息,右侧卧位保持 30 分钟,再恢复平卧位。
1. 测试时长默认 180(操作页面可以自定义)
2. 主板上面有震动传感器。
3. 每秒钟检测一百次,将震动的结果进行累加(频率检测)。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。测量体温(肛温)
- 用电子体温计来测量婴儿温度。用外用乙醇、肥皂水清洁体温计末端。在体温计末端涂点润滑剂,比如凡士林。
- 让宝宝肚子朝下,趴在你的腿上,不要堵住口鼻。用你的手掌扶住他背部下方、臀部之上。 一手大拇指和食指微微撑开宝宝的肛门,另一手将体温计缓慢插入肛门(1-3 厘米)的深度。不要插得太深。用两只手指稍稍固定住体温计,用其余手指托住宝宝的臀部。
- 就这样保持 1-3 分钟,直到听到体温计的“滴滴”声或读数稳定之后,撤走体温计,平视读出体温计上的温度,记录。
- 清洁消毒体温计,以备下次使用。
- 将宝宝得到裤子穿好。
1. 测试时长默认 180(操作页面可以自定义)
2. 肛门有恒温器。(理论上可以做到设定任意温度,但目前尚未实现)
3. 加热频率较为复杂,并且需要一定的加热时间。时间过长、过短都会影响结果。
恒温器的制作工艺对结果也有影响。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。腹胀处理
- 婴儿平躺,暴露出腹部
- 用手掌前半部分,一手画整圆,一手画半圆,两手掌交替,按照顺时针方向进行按摩
- 脐带未脱落时,要避开脐部。
1. 测试时长默认 180(操作页面可以自定义)
2. 腹部有双联触摸传感器。
3. 每秒检测一次,连续 3 次检测成功算作一次有效记录。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。安抚轻摇
- 横抱宝宝,头部枕在照护者臂弯里面,口鼻不要堵住,宝宝的胸腹部要贴着照护者的胸腹部,一手扶住宝宝臀部,另一手扶住宝宝的臀部、腰部和背部。
- 身体轻微的晃动,幅度不能过大,轻轻拍打宝宝的臀部。
- 同时可以制造一些白噪音,或哼唱摇篮曲,帮助宝宝入睡。
1. 测试时长默认 180(操作页面可以自定义)
2. 主板上面有震动传感器(陀螺仪也可以做受力检测)。
3. 每秒检测一次,连续 3 次检测成功算作一次有效记录。
4. 检测的同时伴随姿态检测、粗暴护理检测。
5. 检测结果显示在控制平台,只做客观评价,并且提供操作过程中的数据。头部支撑
- 照护者坐位,放松,背后垫软枕,脚踩小凳子,宝宝背部和照护者腿部之间也垫好软枕。
- 将宝宝头部靠在肘弯里面,头和身体呈一条直线。
- 宝宝的身体与照护者身体贴近。
- 如果是新生儿,不仅要托住宝宝的头部和肩部,还要托住臀部。
在之前与教研团队沟通时,得知头部支撑是与其他功能联动。
例如喂奶操作、海姆立克。并且在不同操作下的判定条件是不一样的。
目前的倾斜传感器解决方案无法实现有效判定,并且再设计之初并没有考虑到会有复杂场景下的支撑判定, 所以在硬件方面暂时不支持。硬件部分只能在下一代娃娃中进行修改了。
传感器原理
触摸芯片原理
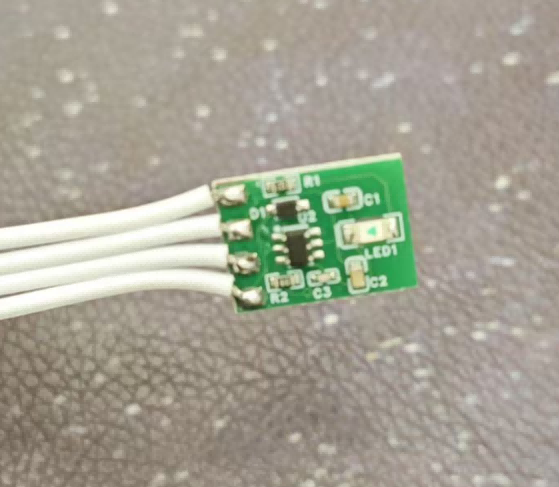
触摸芯片的原理是检测电容变化。人体、金属、电场、磁场都可以引起触摸传感器芯片发生变化。
倾斜传感器原理
倾斜传感器只有两种状态:正、反。
震动传感器(上下)原理
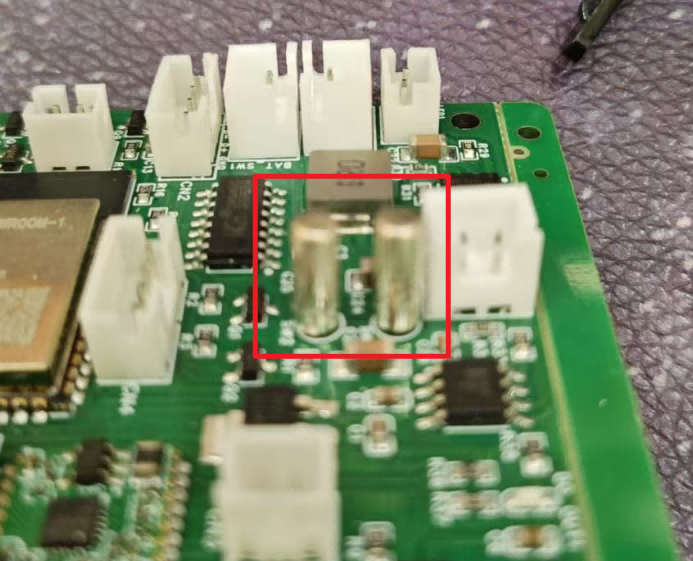
高精度震动传感器,当主板因拍打产生震动时,就会引起传感器的电平发生变化。但是因震动的频率实在过快(毫秒为单位的变化),无法统计即时的状态。
项目中的使用是改为检测频率。
注意:娃娃晃动主板不一定发生振动
震动传感器(左右)原理
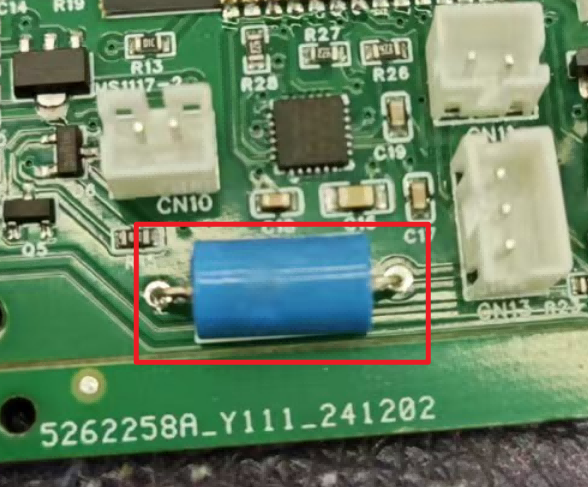
震动传感器,当主板发生左右晃动时也会发生变化。因为变化是瞬时的,还是改为频率检测才能使结果更加准确。
注意:娃娃晃动主板不一定发生振动
六轴陀螺仪原理
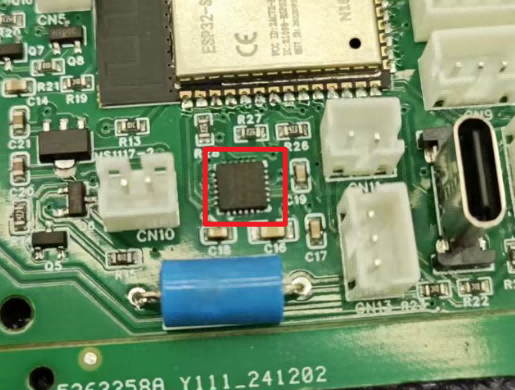
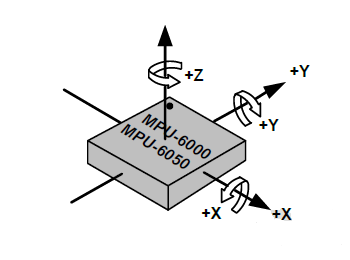
分为三维加速度计与三维角速度计。
三维加速度计:可以用来判断 x、y、z 方向的受力方向,解算陀螺仪的姿态。
三维角速度计:理论上静值状态下都为零,受力就会发生变化。可以用来解算陀螺仪的受力情况。
因个人能力与 MicroPython 性能影响,无法充分使用陀螺仪的全部功能。
RFID 原理
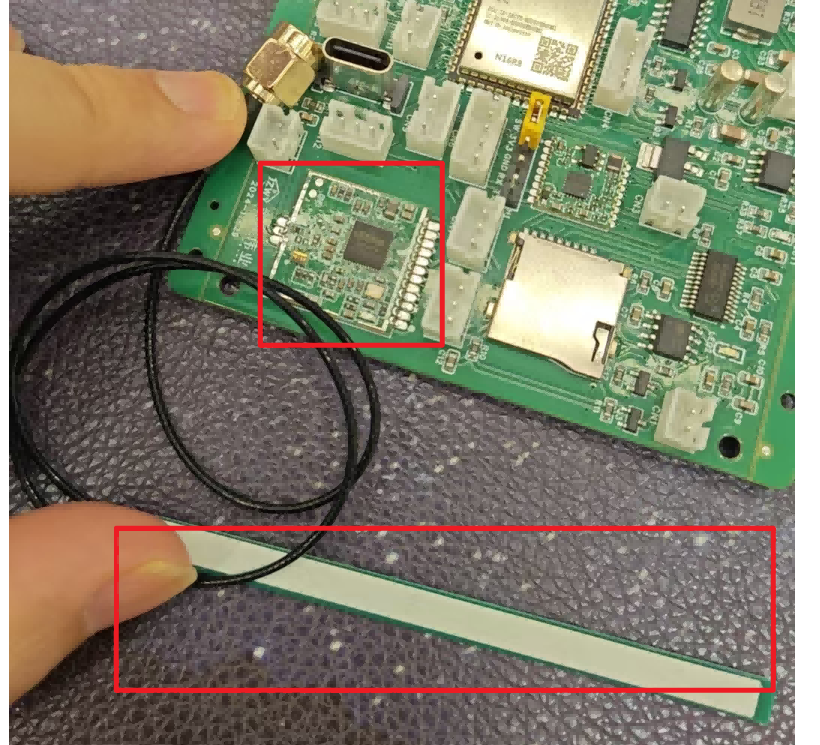
RFID 主要是用天线读取标签的信息,标签有以下三种。衣服里面缝制的是第二种(有效范围 2-5 cm),第一种经过测试后效果最好(有效范围 5-15 cm).
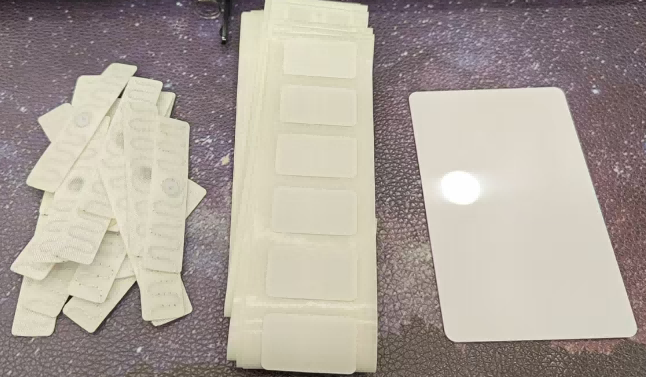
其实还有手环之类的异性 RFID 标签。

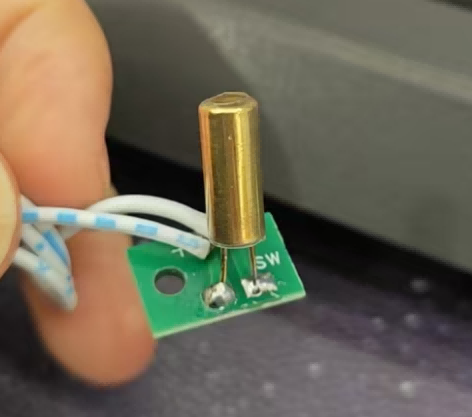
恒温器原理
恒温器是公司自己设计的一个部件。在实际生产中,有不少因素都会影响测量结果。
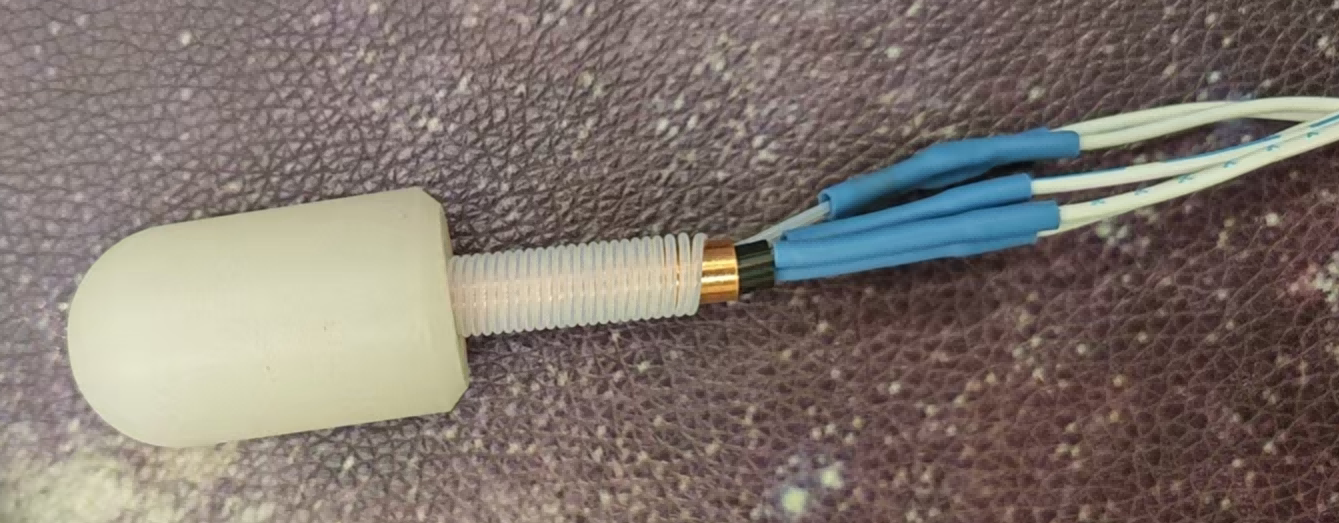
- 镍铬丝:圈数(长度)、放置的位置。
- 18b20 传感器插入到紫铜管的位置、传感器与紫铜管接触的紧密程度。
- 热熔胶添加份量。

恒温器应该要标准化
重要问题
语音模块
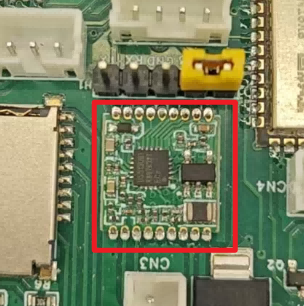
语音是一个单独的模块。目前我们采用的是离线语音模块,可以自定义唤醒词,需要在专门的平台定义、生成
SU-21T 模块
音频播放
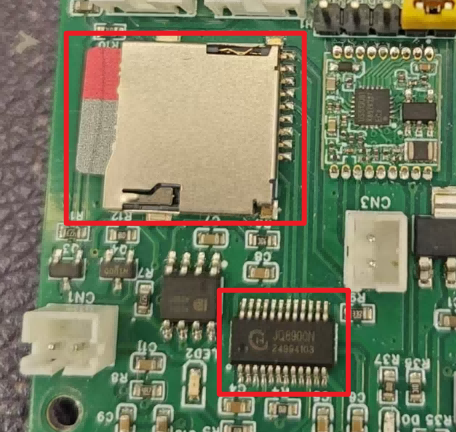
目前的音频播放采用的是 JQ8900U,这个模块自带存储卡。在使用是需要提前讲音频文件拷贝到存储卡,然后才能播放。
如果主板安装到娃娃里面去了之后,如果想要播放新的音频,就需要重新拷贝进去。
写在最后
关于婴儿程序定制化的需求
关于实现语音互动问题
这种需求,如果在设计娃娃之前,技术人能够提前知晓,设计出来的娃娃就会更符合实际使用。