婴儿二代升级开发笔记
基于 《金职伟业智能仿真婴儿 2.0 升级修改建议汇总》 整理了当前的开发笔记。因为会议上对智能婴儿提出的需求,但是还有很多细节需要确认。
此笔记根据智能化、用户导向进行设计,力求尽量贴合使用需求设计娃娃功能。
待确认细节
调试喂奶喂食时,教研的老师说哭声有点不一样。对与每个项目的状态音(例如:哭、笑、咳嗽、吸吮)等的声音是否需要更换。 研发人员无法辨别状态音是否是正常的,教研是否可以提供协助。- 根据之前提供的《金职伟业智能仿真婴儿 2.0 升级修改建议汇总》,是粗暴的将所有的项目结束音改为了笑声(无论成功还是失败)。对于成功与失败,是否播放对应的哭死与笑声。以及竞赛模式下,也是播放带有结果的状态音还是播放无结果状态的
嘟~音。 - 会议上提出需要更加精准的数据,并且在 智能婴儿后台呈现效果图_教研出品.docx 提供的效果需求图中一些需要绘制的图形需要更加精准的数据。但是更加精准的数据会导致三端程序都需要修改,数据表也要变更,开发所需要的时间将会比会议上预定的时间要长。
- 《智能婴儿后台呈现效果图_教研出品.docx》中提到一些需求判定还需要进一步沟通(一些指标无法计算出来),还有一些指标只能通过
造假的方式实现(例如:清洁轨迹无法判断实际是符合清洁的,但是可以用触摸的时长进行判定。),不清楚教研是否能够接受。 - 在最新一版的程序里面,操作时长是可以设定的,是否需要设定每个项目的操作时长范围(最短、最长操作时间)。
- 目前所有操作都没有评分功能。
开发过程中遇到的问题
- 网络信号弱可能会导致主板程序无法将结果发送给控制管理平台
功能设计
喂奶喂食
- 喂奶喂食项目目前结束都是播放笑声。竞赛模式、训练模式下结束的声音是否需要区分。
个人建议竞赛模式下只发出嘟的一声,训练模式下,成功操作为笑声,失败操作为哭声。 - 头部支撑功能显示没有问题
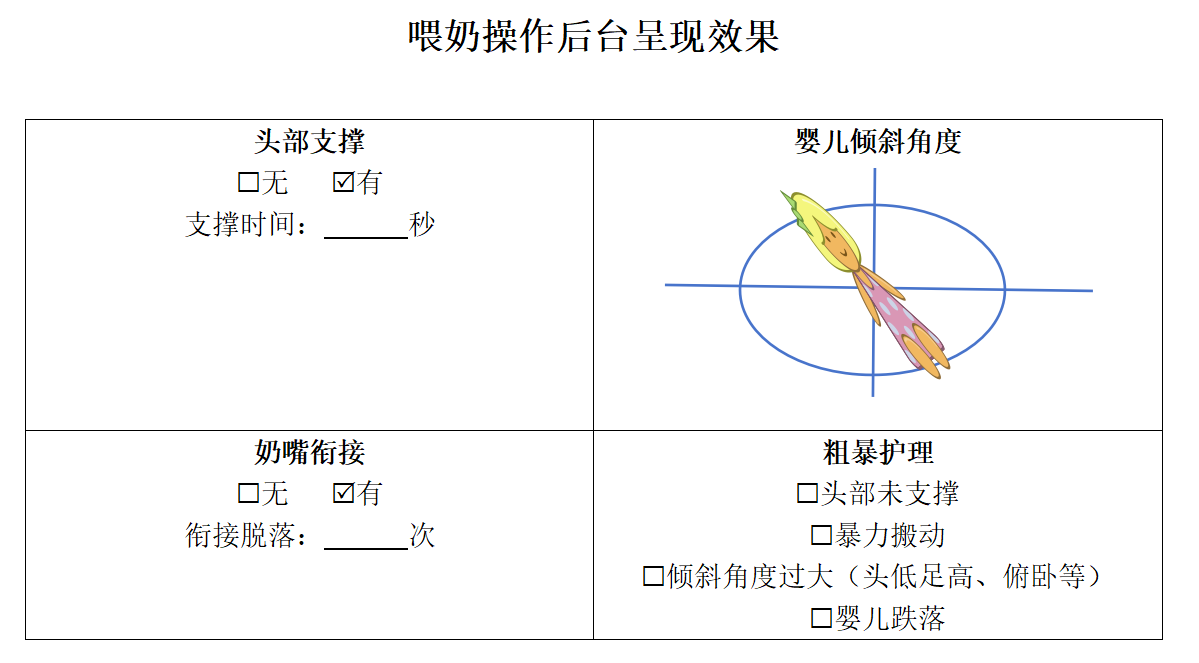
- 整个项目操作时间为 30 秒,倾斜角度采用平均值,还是特定的时间段(开始、中间、结束时)的姿态。
- 15 度以下,容易呛奶。大于 90 度就不行,最佳的 60 度。(很小 30 中间 45 再大一点 60);呛奶是否有声音
- 小宝宝不能坐
- 正常操作的时候,宝宝会保持在一个恒定值。如果不正常,在网页上显示倾斜角度异常。
- 特殊的情况下给呛奶,情景模拟。
- 建议衔接脱落单位改为秒,需要跟万方总确认。
- 粗暴护理
- 头部未支撑的阈值(例如总共时长为 10 秒,多少秒未支撑判定为头部未支撑)中间如果有一秒钟没有支撑,就代表出现了未支撑
- 粗暴护理中的头部未支撑应该是完全未支撑
- 暴力搬动(暴力搬动的力判定值是多少 G,是否区分 x、y、z 方向)3 左右
- 倾斜角度过大(多少度、或者说什么姿态下,判定为倾斜角度过大,正常的喂奶姿势有哪些 (母乳不考虑),倾斜角度过大的姿态是否需要区分) 倾斜角度过大的姿态可以识别就识别出来
- 婴儿跌落(婴儿跌落的判定条件)大于 9 测试操作中,有拍击力度大于 9 的
功能设计
前端部分按照 智能婴儿后台呈现效果图_教研出品 已经实现,但是存在以下几个小问题
- 婴儿倾斜的图片在姿态不对的情况下,并且在操作过程中出现了多种错误姿态(例如:头高脚底、俯卧)时,应该显示哪一种姿态,还是不显示姿态,或直接显示一张姿态错误照片。
- 奶嘴衔接脱落次数是否可以更加详细说明。目前是用的衔接时间。
粗暴护理中的头部未支撑是一次未支撑还是完全未支撑- 目前娃娃
智能化的设计是在社交模式下,添加了姿态错误的哭声播放
其他事项
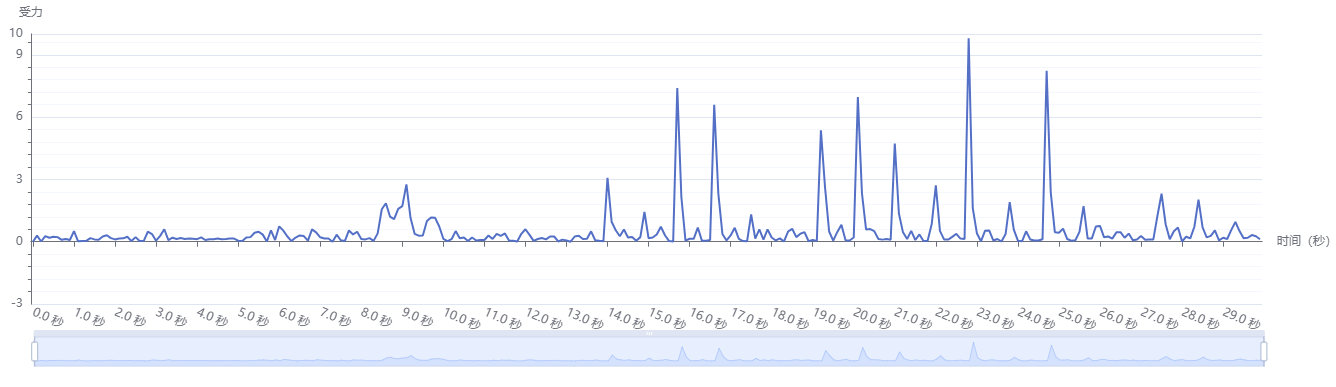
- 喂奶操作是否需要绘制娃娃的受力图
设计逻辑
- 主板程序采集喂奶、头部支撑、姿态、加速度数据。每 0.1 秒一次。
- 操作模式分为竞赛模式、训练模式、社交模式。
- 社交模式下:执行的过程中会判断是否连续 3 秒成功或者失败。如果连续 3 秒成功,则播放吸奶声,如果连续 3 秒失败,则播放哭声。
- 社交模式下:执行过程中还会判断姿态是否正常,不正常则播放哭声。
- 程序运行结束,无论成功与识别,都会播放笑声。
喂奶喂食项目状态图
海姆立克
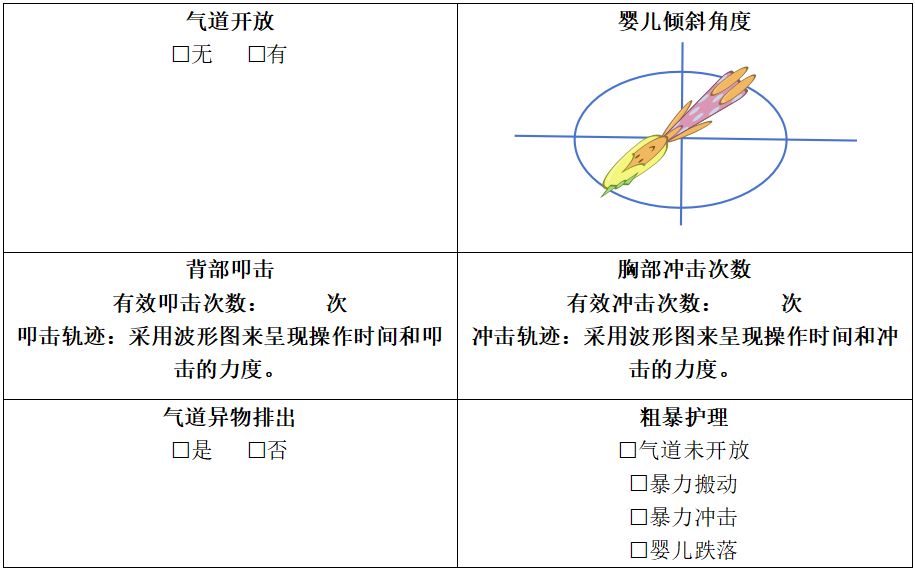
- 气道开放 是指海姆立克操作成功之后,吐出异物的操作吗?如果操作失败就 不开放气道 是不是。 气道开放是指做海姆立克时是否撑着下巴,让头部往上撑,保障气道通畅
- 婴儿没有设计胸部冲击功能,所以无法采集次数绘制。胸部冲击与背部冲击是在同一次项目中操作吗?如果胸部冲击与背部叩击在发送指令操作之前明确,那也能够绘制。但是背部叩击与胸部冲击无法同时存在与同一次操作中。 背部叩击与胸部冲击是循环操作的,先叩击五次背部,然后再冲击五次胸部,此为一个循环。
- 背部叩击图使用下面这个图片中显示的效果是否可以。
- 婴儿的倾斜角度同
喂奶喂食 - 气道异物排除的判定标准是什么。婴儿二代娃娃目前只能控制排出异物,小钢珠是否流出来与操作等一些因素有关(例如小钢珠没有到软管中), 无法百分百控制。 社交模式下,海姆立克运行完毕就会吐异物(暂定)
智能化设计
姿势不对的时候就哭 -
冲击大约一秒一次,力度是不需要分析
解说的标准 - 还早,暂时先不考虑
操作标准,快了、慢了
操作标准
- 频率、一秒一次
- 力度没有标准
- 先拍五次背部,然后按压五次胸部。两个循环
至少完成一个循环,如果异物拍出来了,可以提前结束。
李金灿老师操作两个循环的单纯的操作时间是 45s,两个循环至少是 60s,操作加讲解建议给 90s。
胸部冲击:头高脚底,胸部正面朝上 功能设计
- 气道开放:婴儿二代无法判断
- 海姆立克操作,是背部与胸部都要冲击吗?
- 粗暴护理
- 气道未开放 - 头部倾斜角度的判断,婴儿二代无法完成
- 暴力搬动 - 海姆立克冲击就会判断受力,这个功能与暴力搬动冲突了。或者可以在没有拍击的情况下检测暴力搬动,但是没有大量的实际数据当做参考,暂时无法完成。
- 暴力冲击 - 海姆立克本身冲击的力气可能就会很大,导致无法筛选出暴力冲击的结果。
- 婴儿跌落 - 海姆立克冲击也可能会被识别为婴儿跌落
海姆立克项目状态图
拍嗝处理
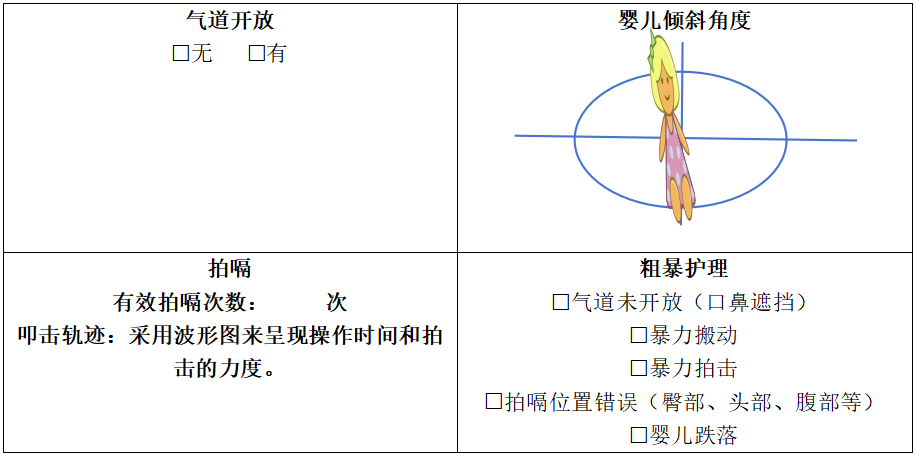
- 气道开放婴儿二代娃娃无法判定
- 拍嗝位置操作无法判定
拍嗝处理项目状态图
更换纸尿裤
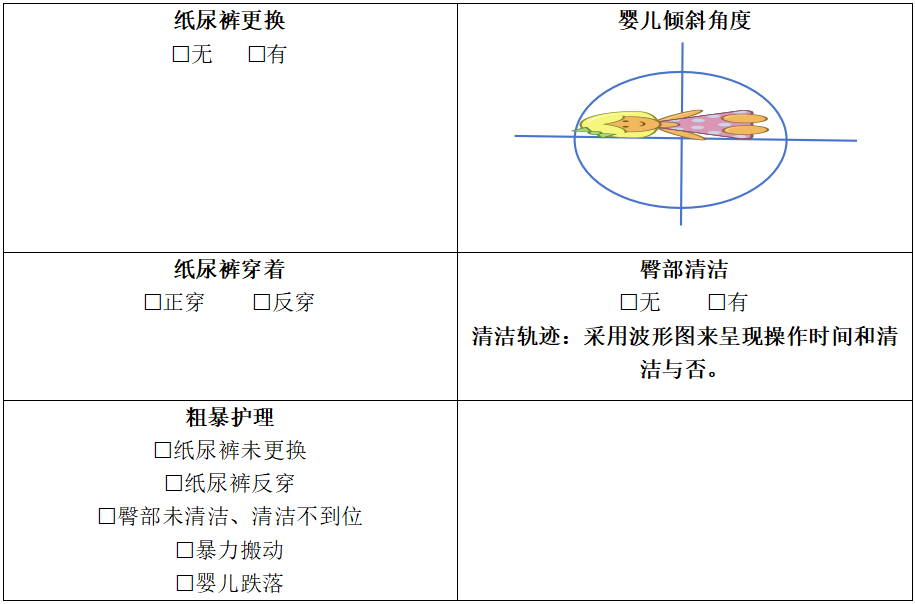
- 纸尿裤正反穿无法判定
- 更换纸尿裤与臀部清洁是否是一体的,单个操作失败是否会影响其他操作。
- 臀部清洁完成度,是否可以用清洁时间来进行判定。
更换尿裤的操作步骤、操作时长
- 清洁完成度需要先确定清洁的大概时长,然后在构思算法进行计算。
清洁完成度需要先确定清洁的大概时长,然后在构思算法进行计算。
需要教研的老师确定几个值:
- 更换纸尿裤的操作时长大概是多少。60s 还是 180 秒,或者是可选的几个值,例如 60s、90s、120s、180 秒。
- 臀部清洁在更换纸尿裤中,操作占比时长百分比大概时多少。
更换纸尿裤项目状态图
测量肛温
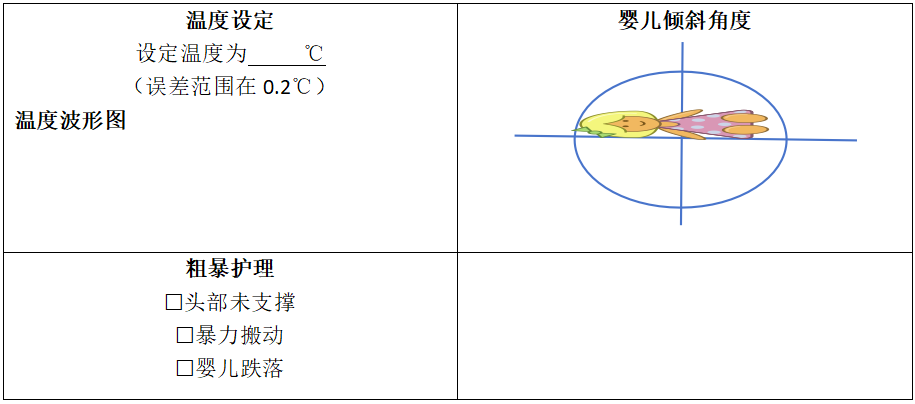
- 测量肛温的温度波形图是否准确与温度补偿值有直接关系。
38 -> 38.5
[21.25, 21.1875, 21.25, 21.25, 21.4375, 21.625, 21.8125, 22.0625, 22.375, 22.6875, 23.0, 23.3125, 23.625, 23.9375, 24.3125, 24.5625, 24.875, 25.1875, 25.5, 25.8125, 26.125, 26.375, 26.6875, 26.9375, 27.25, 27.5, 27.75, 28.0, 28.25, 28.4375, 28.6875, 28.9375, 29.125, 29.375, 29.5625, 29.8125, 30.0, 30.1875, 30.375, 30.5625, 30.75, 30.9375, 31.125, 31.3125, 31.5, 31.6875, 31.8125, 32.0, 32.125, 32.3125, 32.5, 32.625, 32.8125, 32.9375, 33.0625, 33.1875, 33.375, 33.5, 33.625, 33.8125, 33.9375, 34.0625, 34.1875, 34.3125, 34.4375, 34.5625, 34.6875, 34.8125, 34.9375, 35.0625, 35.125, 35.3125, 35.375, 35.5, 35.625, 35.75, 35.8125, 35.9375, 36.0625, 36.125, 36.25, 36.375, 36.4375, 36.5, 36.625, 36.75, 36.8125, 36.9375, 37.0625, 37.125, 37.25, 37.3125, 37.375, 37.5, 37.625, 37.6875, 37.75, 37.875, 37.9375, 38.0, 38.125, 38.1875, 38.0, 37.6875, 37.25, 37.0625, 36.875, 36.75, 36.6875, 36.6875, 36.75, 36.8125, 36.875, 36.9375, 37.125, 37.1875, 37.3125, 37.4375, 37.5625, 37.6875, 37.8125, 37.9375, 38.0625, 38.1875, 38.3125, 38.1875, 37.9375, 37.5625, 37.375, 37.1875, 37.125, 37.125, 37.125, 37.1875, 37.1875, 37.3125, 37.4375, 37.5625, 37.6875, 37.8125, 37.9375, 38.0625, 38.1875, 38.4375, 38.3125, 38.0625, 37.75, 37.375, 37.1875, 37.0625, 36.9375, 36.9375, 36.9375, 37.0, 37.125, 37.25, 37.375, 37.5, 37.6875, 37.8125, 37.9375, 38.125, 38.3125, 38.5, 38.4375]问题
- 测量肛温的姿势
测量肛温项目状态图
暴力操作的阈值
5 为暴力
6 海姆立克暴力