第二代智能仿真婴儿说明书
娃娃介绍
规格:月龄 3-6 月,身高 52 厘米左右,分男女性别。
材质:使用高分子 PVC 材料软胶,无毒、防火、耐脏、抗摔打。
外观:外观仿同龄真人。设颈部、髋部、臂部关节:颈部关节能实现头部的左右转动和抬头低头功能;颈部、髋部关节能实现一定角度的转动;
婴儿整合外壳使用新工艺搪胶,手感柔软、耐脏、耐摔;
头部使用 304 不锈钢连接套件,其中头部的连接套件不仅能限制左右转动,也能限制抬头、低头角度。
四肢使用 304 不锈钢连接套件,限制四肢转动的角度,使用转动更合理;

结构及元配件位置图
主板 MCU 最大主频 240MHZ,默认 180MHZ,16M 内存。
主板 WIFI 及蓝牙模块(网卡)、方便接入因特网。
集成了语音识别模块、声音处理模块、音频功放模块、集成 TF 读卡器(TF 卡存储 32G)。
集成了电源管理模块(充电、输出、锂电池保护)。
使用 8000MAH 的锂离子聚合物电池,发热小、安全、续航能力强。
集成恒温器模组,使之能够进行肛温测量。
可以运行执行喂奶操作、海姆立克、拍嗝处理、测量肛温等操作;
使用 OTA 主板程序自动升级技术。
主板整合语音识别模块,能离线识别常用操作指令。
在同一个局域网内最多可连入 254 个婴儿,通过控制管理平台,可以对世界上的任何一个智能仿真婴儿进行进行操作。
每一个智能仿真婴儿有全球唯一的 MAC 地址,以这个 MAC 地址做为它的身份证。
智能仿真婴儿与控制管理平台是通过 MQTT 协议进行指令和信息发送。
智能仿真婴儿分男性和女性,通过控制管理平台通过管理平台可以改变婴儿的性别。
能自主识别卧、坐、爬、倒等姿态。
可以播放音乐、童话故事、成语故事、歇后语、脑筋转弯等;
智能仿真婴儿控制管理平台使用 BS 架构。
可使用语音指令控制;使用 MQTT 消息发送;
通过控制管理平台可以进行考试与竞赛;
智能仿真婴儿在控制管理平台中可以实现婴儿自检(自检各功能操作是否正常);
使用注意
开机、关机、充电
本款智能仿真婴儿的电源开关位于后颈,由两个部分组成,分别是电池开关与主板开关。如下图
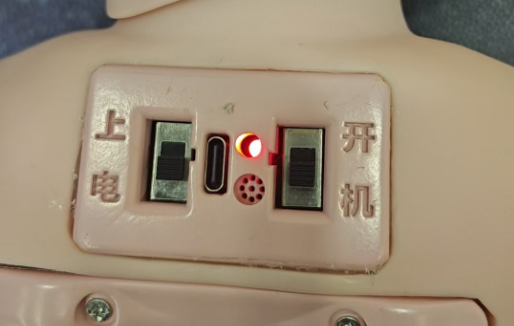
左边锂电池开关,右边是主板电源开关。长期不用,请关闭电池开关,使用时请先打开电池开关,然后再打开主板开关。 这两个开关是按钮滑动开关,往下滑是打开,往上滑是关闭。
1、开机
当两个开关都置于"开"状态时,与此同时会发现婴儿颈下小板的 LED 指示灯会发亮,如上图。这时会听到三个声音:
单音节声音:表示婴儿已经连接上了 WIFI。(叮~)
三音节乐音:表示已经连接上服务器。(咚咚咚)
欢迎使用金职伟业智能婴儿:表示准备就绪,可以正常操作了。
2、关机
长期不用关机时(一周以上),两个开关都是关了。
平常只关主板开关。
3、充电
打开锂电池开关,将配送的 USB 数据线插入到颈下小板的 USB 上,另一端插入到配送的充电头上,不能是别的充电头。
首次充电 4 小时以上,大约 8 小时可以充满,不支持快充。
充电时指示灯出现亮灭现象,当充满时,指示灯常亮。
在使用时,如果锂电池电量足,在非充电时,指示灯为常亮。如果出现快速亮灭,说明锂电池电量将耗尽,最多还可维持 30 分钟,请迅速充电。
不提倡边充电边使用。
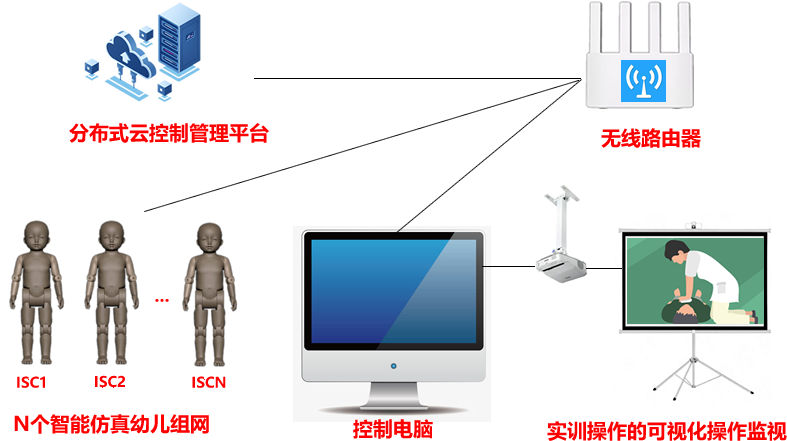
智能仿真婴儿系统组成
智能仿真婴儿系统由五大部分组成:
- 分布式云控制管理平台
- 无线路由器
- N 个智能仿真婴儿组网
- 控制终端
- 实训操作可视化操作监视设备
远程固件自动升级
每一次开机时,智能仿真婴儿自动检测在服务器上有没有升级的固件存在,如果有,就会提示"发现新固件,请等待升级" ,一分钟内,固件升级成功并提示"升级成功,系统马上重启"。
温馨提示:如果系统正在升级固件,请不要关机断电。
功能描述
智能仿真婴儿介绍
智能仿真婴儿系统采用物联网技术、人工智能,能实现空中远程无限自动升级(OTA),能实现全球范围的联网、组网,不受时间、空间的限制。 通过网络,控制管理服务器可以控制管理分布在全球的每一个智能仿真婴儿,可实现自定义分组、实训操作、考试竞赛、学习社交的管理。
智能仿真婴儿使用内置锂离子聚合物电池,容量 8000mah。充足电池供电可静态待机时间约 240 小时,持续工作 120 小时。
运行模式介绍
1、实训模式
这种模式下,操作时系统会用语音给出操作指导或提示。当操作结束时在平台可以看到操作结果。
2、竞赛考试
这种模式下,操作时系统不会用语音给出操作指导或提示。当操作结束时在平台可以看到操作结果。
3、社交学习
这种模式下,这种模式下有更多的操作功能;系统允许用户播放内置儿歌、故事、成语、歇后语、脑筋急转弯题等。
主要功能介绍
喂奶喂食:使用奶瓶喂奶、喂水,使用勺子喂食。
海姆立克:婴儿被异物卡住时的紧急处理。
拍嗝处理:吃奶时出现打嗝的应急处理。
测量肛温:使用水银肛温计或电子温度计,测量出肛内的温度。
控制管理平台
操作指南
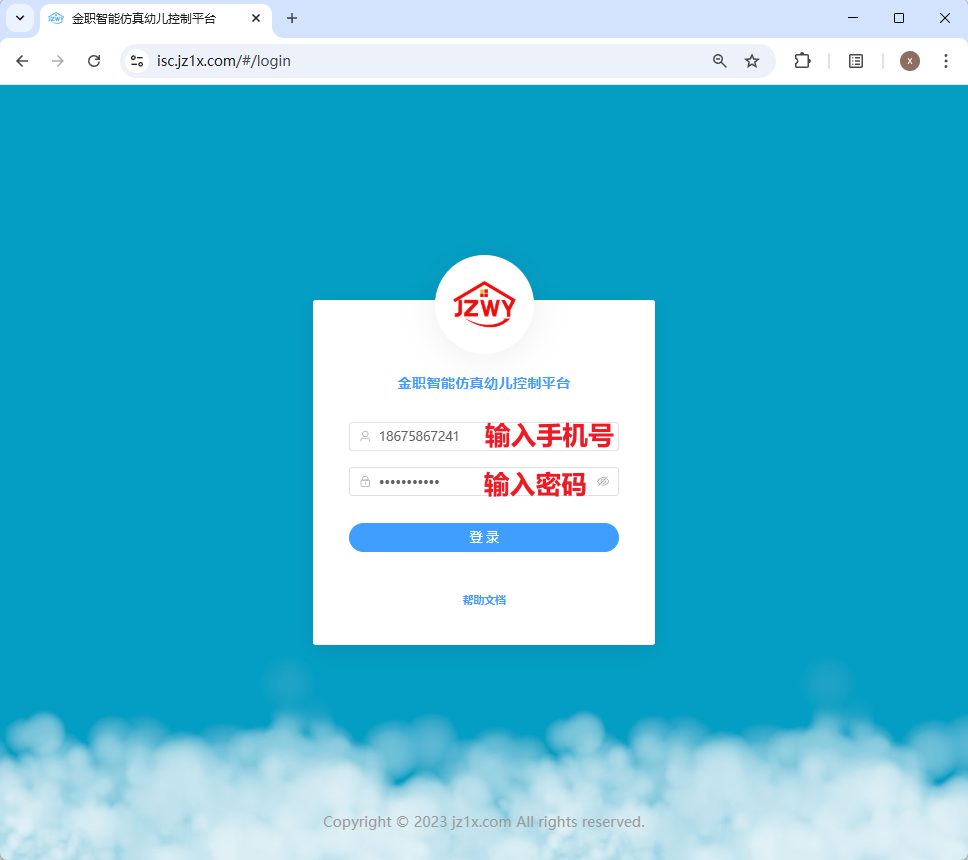
1、系统登录
在收到仿真婴儿以后,使用浏览器访问 https://isc.jz1x.com/ ,就会进入到登录页。
输入账号密码(院校管理员)进行登录。
成功之后就可以看到用户所在院校的信息,以及右侧的管理功能

当前登录的是院校老师、院校管理员角色,所以可以看到院校管理模块。院校管理模块下可以管理学校的用户原理、娃娃管理、场地管理(班级管理、教室管理)。以及可以操作记录(幼儿)。

启动智能仿真婴儿
在启动娃娃之前,需要先设置一个 WIFI,这里推荐使用金职伟业智能仿真婴儿配备的路由器,设置 WIFI 名为 CCMC_jzwy ,密码为 285251897_jzwy,WIFI 信号频段必须为 2.4GHz(5G 网络也可以设置 2.4GHz 频段)。如果不会设置请查看 路由器的配置
注意:路由器的账号密码请复制粘贴,很容易输入错误
设置好 WIFI 之后,就可以打开智能仿真婴儿后颈的开关启动娃娃。启动之后,如果有"欢迎使用金职伟业智能仿真婴儿"语音播报,就说明已经启动成功。
操作娃娃
操作娃娃之前,需要系统中存在娃娃的信息。没有的话可以自己添加,添加成功之后,就可以进行操作了。
在娃娃管理页面,可以实现对娃娃的增、删、改、查功能,页面内容如下。
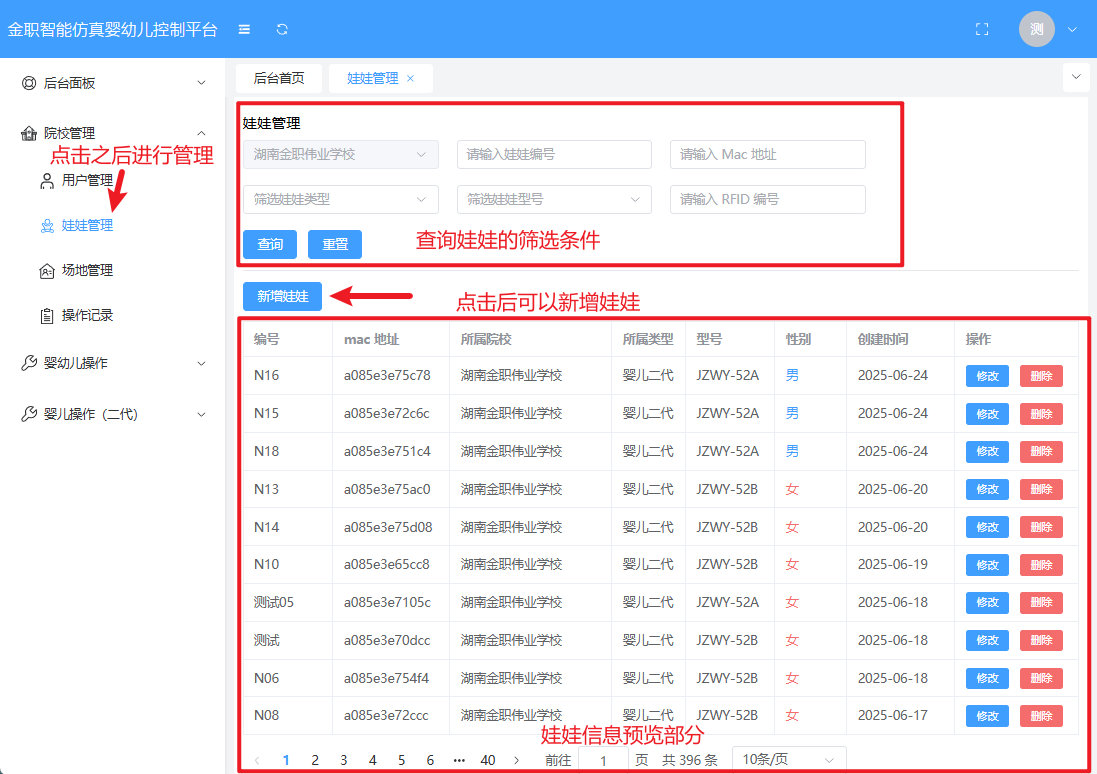
添加娃娃
点击 新增娃娃 按钮,就可以打开新增页面
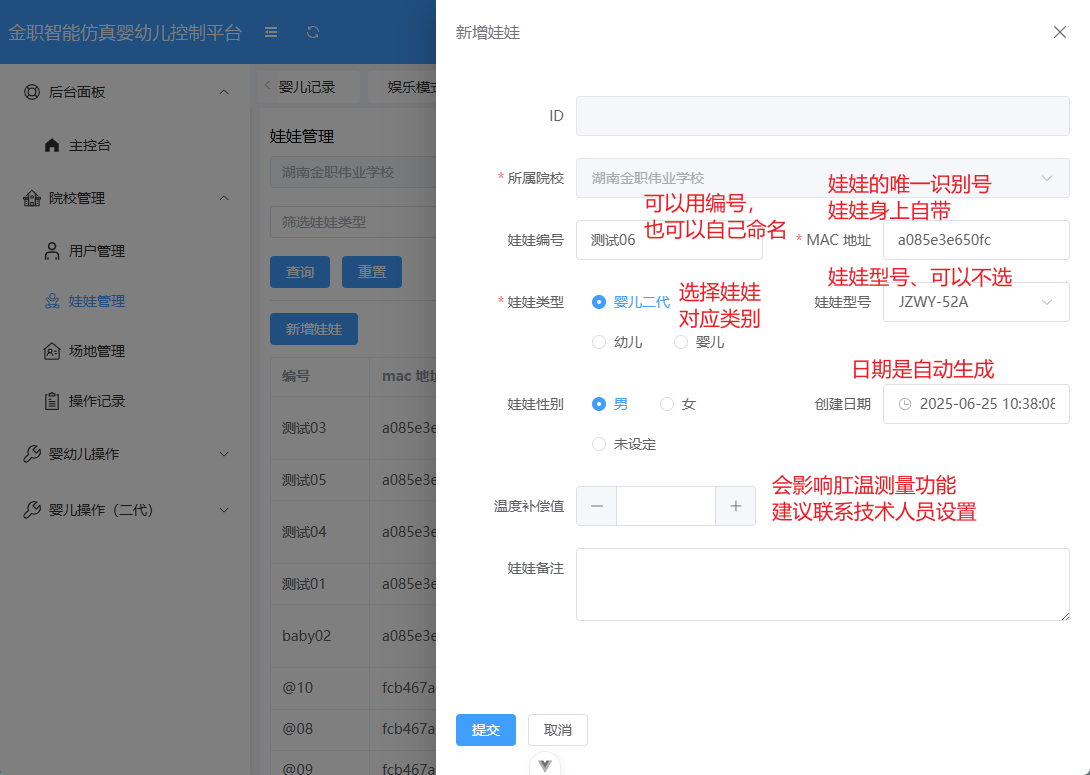
点击提交之后,就可以看到多了一条记录
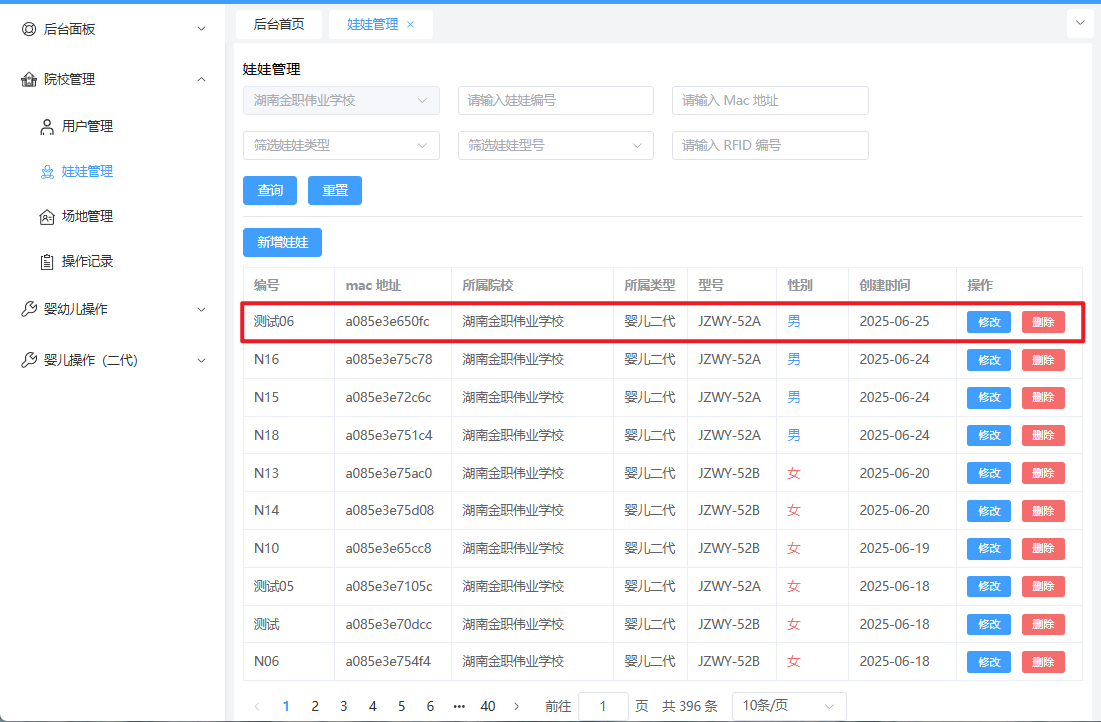
新增好了之后可以对娃娃信息进行修改、删除,操作并不复杂,点击对应的按钮就可以进行操作。
操作娃娃
"操作管理"中分为"实训模式"、"竞赛模式"、与"娱乐模式",三种模式的操作方式大同小异,但是内容有一些区别,操作的时候需要注意。
这里先演示一下实训模式。点击"操作管理"、"实训模式",可以看到页面分为好几个部分。

a、做上面是实训项目,每一个项目都对应不同的操作,可以进行多选,会按照顺序执行。
b、实训项目下是选择娃娃。如果是老师、管理员角色则可以看到当前院校的所有娃娃,如果只是学生(需要老师自己添加学员账户),则只能看到与学员绑定的教室里面的娃娃。更详细的内容可以查看 场地管理 相关功能介绍。
c、点击选择娃娃部分的蓝色文字,就可以展开对应的娃娃信息。展开之后,如果显示的是灰色的,则表明娃娃不是在线状态。如果是正常颜色,表明娃娃启动并已经链接到服务器,可以选择进行后续操作。
d、选择了操作项目、在线的娃娃之后,就可以提交指令,然后娃娃就可以做出响应。如果勾选的是不在线的娃娃,指令可以照常提交,但是娃娃不会有反应。
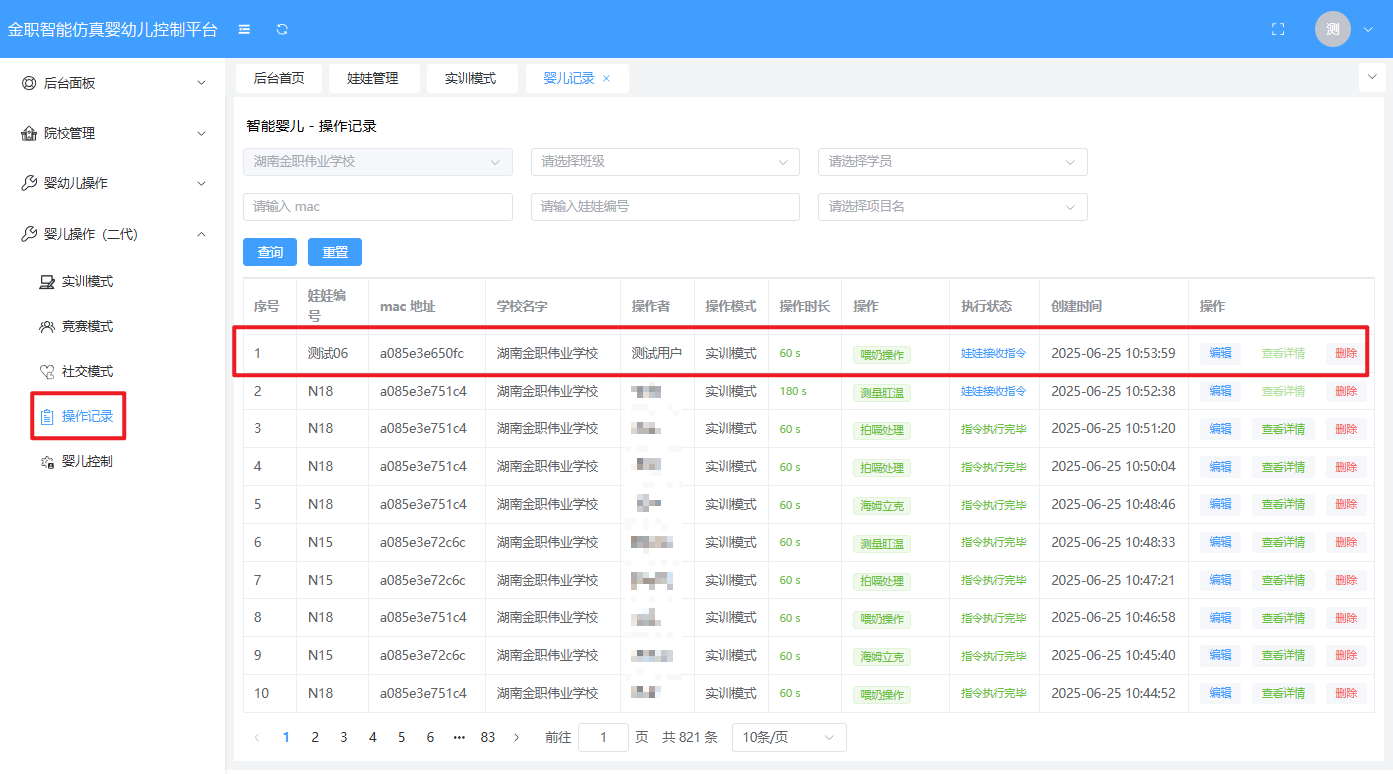
e、对娃娃提交指令之后,可以在 "婴儿操作(二代)"、"操作记录" 下看到提交的记录,以及操作的信息。
婴儿操作项目
| 序号 | 实训项目 | 幼儿模式 |
|---|---|---|
| 1 | 喂奶操作 | ✅ |
| 2 | 海姆立克 | ✅ |
| 3 | 拍嗝处理 | ✅ |
| 4 | 测量体温 | ✅ |
操作模式下分为 实训模式、竞赛模式、娱乐模式 三种
1、实训模式:用于日常训练使用。
2、竞赛模式:用于考试、竞赛。
3、社交模式:用于平时操作、日常操作。
因为其中大部分项目时类似的,所以一起介绍,如果是某个模式特有的,则单独进行介绍
喂奶操作
在控制管理平台的操作页面,选择
喂奶操作项目,然后选择对应的娃娃,提交指令。平台发送指令之后,在
院校管理、操作记录中会生成一条记录,指令有发送成功、接收成功、执行成功三种状态。稍等片刻,娃娃就会播报发出
咚咚咚 喂奶操作的声音播报,然后按照语音提示就可以开始对娃娃的操作。操作时,当操作者使用勺子或奶瓶放入幼儿口中时,智能仿真幼儿能感知操作,能把操作的情况记录下来。
当操作时间到,智能仿真幼儿会自动把操作者的相关信息提交到智能仿真幼儿云控制管理平台,智能仿真幼儿云控制管理平台得到数据后自动分析处理数据并且进行展示。
实训操作过程中有语音操作指示。本项设定完成操作默认时间为 90 秒。
海姆立克
在控制管理平台的操作页面,选择
海姆立克项目,然后选择对应的娃娃,提交指令。平台发送指令之后,在
院校管理、操作记录中会生成一条记录,指令有发送成功、接收成功、执行成功三种状态。稍等片刻,娃娃就会播报发出
咚咚咚 海姆立克的声音播报,然后按照语音提示就可以开始对娃娃的操作。操作时,婴儿面朝下,头低脚高,用手支撑婴儿下巴,拍打婴儿背部。
当操作时间到,智能仿真幼儿会自动把操作者的相关信息提交到智能仿真幼儿云控制管理平台,智能仿真幼儿云控制管理平台得到数据后自动分析处理数据并且进行展示。
实训操作过程中有语音操作指示。本项设定完成操作默认时间为 90 秒。
拍嗝处理
- 本类操作是针对喂奶过程中出现的婴幼儿打嗝现象。
- 在控制管理平台的操作页面,选择
拍嗝处理项目,然后选择对应的娃娃,提交指令。 - 平台发送指令之后,在
院校管理、操作记录中会生成一条记录,指令有发送成功、接收成功、执行成功三种状态。 - 稍等片刻,娃娃就会播报发出
咚咚咚 拍嗝处理的声音播报,然后按照语音提示就可以开始对娃娃的操作。 - 操作时,将娃娃抱在怀里,有节奏地从仿真婴儿背部后盖底部开始,拍到后盖的中部,再拍到后盖的顶部,表示拍打的方向由下向上。
- 当操作时间到,智能仿真幼儿会自动把操作者的相关信息提交到智能仿真幼儿云控制管理平台,智能仿真幼儿云控制管理平台得到数据后自动分析处理数据并且进行展示。
- 实训操作过程中有语音操作指示。本项设定完成操作默认时间为 90 秒。
测量体温
- 这里的体温测量采用的是测量肛温。测量时请用水银体温表。
- 在控制管理平台的操作页面,选择
测量体温项目,然后选择对应的娃娃,提交指令。 - 平台发送指令之后,在
院校管理、操作记录中会生成一条记录,指令有发送成功、接收成功、执行成功三种状态。 - 稍等片刻,娃娃就会播报发出
咚咚咚 测量体温的声音播报,然后按照语音提示就可以开始对娃娃的操作。 - 操作时,等待测量结束,发出
嘟的一声。 - 当操作时间到,智能仿真幼儿会自动把操作者的相关信息提交到智能仿真幼儿云控制管理平台,智能仿真幼儿云控制管理平台得到数据后自动分析处理数据并且进行展示。
- 实训操作过程中有语音操作指示。本项设定完成操作固定操作时间为 180 秒。
注意:体温测量时可以设置体温的目标值,但实际会受到环境温等其他因素影响,所以还需要配置娃娃的温度补偿值,才能控制娃娃实际的值。
控制管理平台操作
用户管理
默认系统是一个多用户系统,院校老师 可以给院校添加 院校学员 账户。院校老师、院校学员 登录后看到的页面是不一样的。
老师登录之后可以看到院校管理,还可以管理院校管理下的内容。包括用户管理、娃娃管理、场地管理、操作记录等。
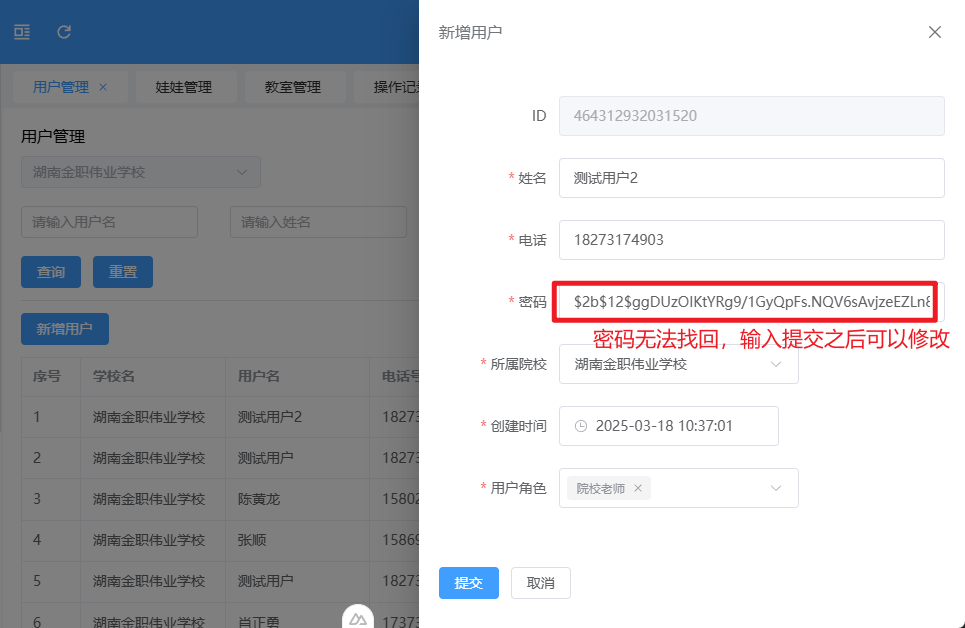
- 点击新增用户

- 录入新增用户的信息
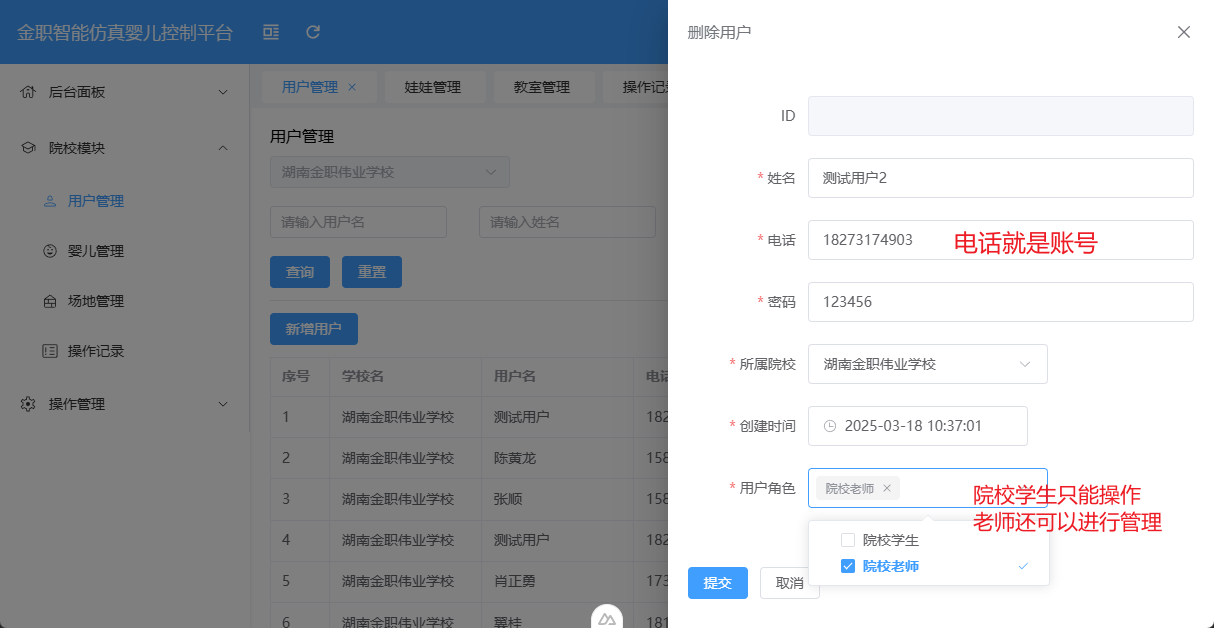
- 点击提交之后,就可以看到新增的用户了

- 新增好了之后可以点击表格内的 修改 按钮进行修改
- 不需要了也可以点击删除,删除之后数据就没了
教室管理
默认情况下,老师账户在操作的时候可以看到所有的娃娃,而新建的学员账户,是看不到任何娃娃。 如果想要让学员也可以操作娃娃,则需要创建教室,然后给场地绑定娃娃、学员。
点击新增教室

录入教室信息
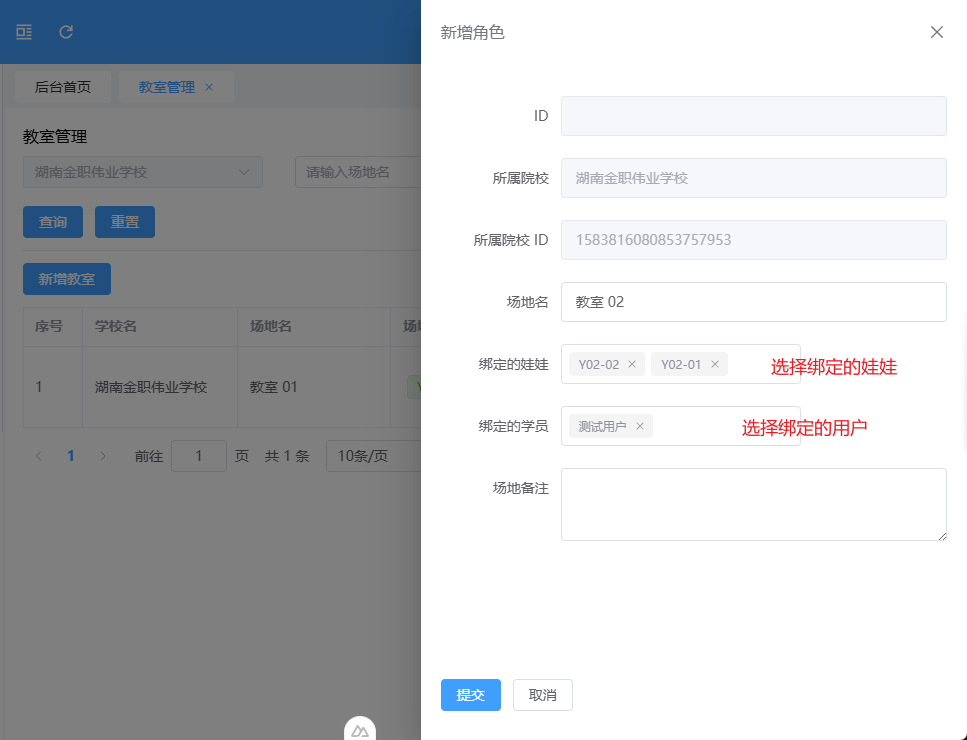
新增之后,可以看到新增的数据

点击 修改 之后可以修改信息,点击删除也可以将场地删除
新增之后,可以在操作管理下看到教室。如果没有看到,则是学员没有绑定到对应的教室,修改一下就可以了。

操作记录
在 操作管理 下的三种模式中操作了娃娃之后,就会在操作记录中生成一个记录。
点击 修改,可以看到更详细的信息。

使用注意事项
1、智能仿真幼儿的头只能左右转动到肩膀,不可强力硬转;由于关节的限制,在做心肺复苏操作时,不能抬头,操作人员只做抬头动作。
2、由于关节的限制,在做海姆立克操作时,不能分开双腿,不可强力掰开,否则会造成损坏。
3、测量体温时,将体温计轻从腋下恒温器口垂直轻轻插入,当插到动时,不能强力插入,否则会造成体温计拆断。
4、只关主板开关时,颈下小板上的指示灯要过 15 秒钟才能熄灭。
附录
配件
- 婴儿充电头(白色)1 个:6*4cm(长*宽)
- 婴儿充电线(白色)1 根:11*6cm(长*宽)
- 衣服 5 件:25.5*20cm(长*宽)
- 奶瓶(带盖)1 个:15*6cm(长*宽)
- 路由器 1 个:19.5*20cm(长*宽)
- 路由器说明书 1 份:10.5*7.5cm(长*宽)
- 路由器网线(黄色)1 根:12*4cm(长*宽)
- 路由器充电线(黑色)1 根:10*7cm(长*宽)
- 水银体温计 1 支:11.5*0.4cm(长*宽)
- 电子体温计 1 支:12.3*1.9cm(长*宽)
- 尿布 2 片:16*12cm(长*宽)
- 勺子 1 支:10*2cm(长*宽)
- 棉签 4 支:5*0.5cm(长*宽)
- 智能仿真婴儿合格证 1 份:12.1*7.6cm(长*宽)
- 智能仿真婴儿说明书 1 份:19*13.7cm(长*宽)
- 仿真奶粉(浑浊粉)1 包:约 8g
路由器配置
将路由器接电,然后用一根网线连接到电脑。
在浏览器上输入 192.168.1.1,可见以下界面,输入初试密码,如 123456。

点击下方 确定,然后再下一步、下一步、到完成。

在 WIFI 设置中,一定要设计好 WIFI 的账号是
CCMC_jzwy,密码是285251897_jzwy。
MAC 地址的绑定 (可选)
为了保证娃娃的 IP 地地址固定不变,就要将其 MAC 地址绑定成一个固定的 IP 地址,以后这个娃娃只要在这个路由器登录,就可以保证这个娃娃的 IP 固定不变。IP 固定不变有很多好处,后续开发中,还要经常用到固定 IP 提供对外服务。
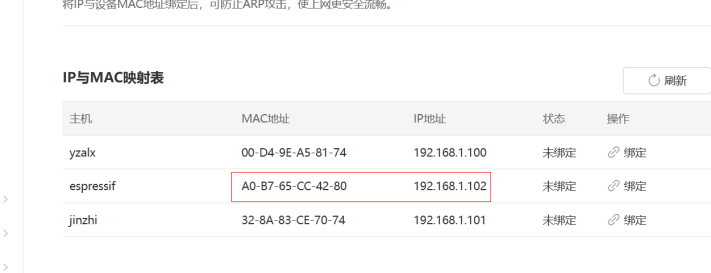
这个娃娃被分配的是 102,但是我要设为 250,怎么设?点击右边的"绑定"
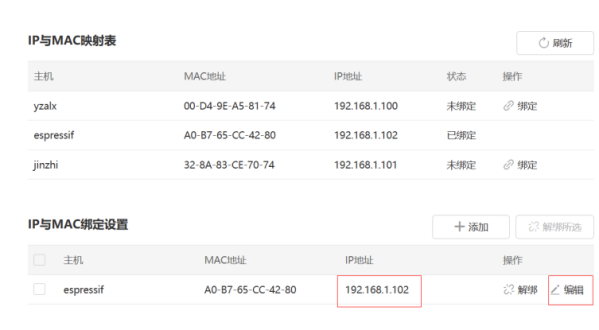

这里改成了 250,然后保存就可以了,以后这个 192.168.1.250 就永久性分给了这个娃娃了。
注:详情设置请参考配送的路由器说明书。
语音控制
本智能仿真幼儿能识别人的语言指令,直接用语音控制幼儿的操作。如
你好,小金,打开听儿歌,智能仿真幼儿打开听儿歌操作。相关操作对应的中文词格式是:你好,小金,<操作词>。
下面是常用中文操作词:
- 你好,小金,听儿歌
- 你好,小金,听故事
- 你好,小金,最小音量
- 你好,小金,最大音量
- 你好,小金,脑筋急转弯
- 你好,小金,成语故事
- 你好,小金,歇后语
- 你好,小金,古诗词
- 你好,小金,打开喂奶操作
- 你好,小金,打开海姆立克
- 你好,小金,打开体温测量
- 你好,小金,打开拍嗝处理